

|
FB76 OUT P05 : Rotary Table outputs |
|
|
|
|
|
Netzwerk 1: Pre-Setting L "E05 4M1 EW182 AmpY" T #tmp_ampY L #tmp_ampY ITD DTR L 4681.14 // 4681.14=1A in Y /R T #Support.Rel_4M1_Crnt_Amp L #Support.Rel_4M1_Max_Amp >=R L s5t#600ms SE "T05 4M1 Start SE" U "T05 4M1 Start SE" = #Support.bit_4M1_Limit_Stop_reached
O "M00 Auto CmpltMa run" O "M03 RunHomPos" = #tmp_seq_cmd_onoff |
|
|
|
|
|
Netzwerk 2: VC804 Stow pin rotary table O #Support.bit_4M1_Enbl_0_180 O #Support.bit_4M1_Enbl_180_0 U #tmp_seq_cmd_onoff O "HMI KEY".P05.VC804.Manual_Jog_output_HP UN "E05 VC804 B45 HP" = "A05 VC804 Y805 HP"
O "M05 VC804 SEQ run WP" O "HMI KEY".P05.VC804.Manual_Jog_output_WP UN "E05 VC804 B44 WP" = "A05 VC804 Y804 WP" |
|
|
|
|
|
Netzwerk 3: 4M1 Rotary table 0-180 U "M05 4M1 SEQ run WP" U #tmp_seq_cmd_onoff O "HMI KEY".P05."4M1".Manual_Jog_output_WP = #Support.bit_4M1_Enbl_0_180
U #Support.bit_4M1_Enbl_0_180 UN "E05 4M1 B43 Pos2" UN #Support.bit_4M1_Limit_Stop_reached = #Support.bit_4M1_CMD_0_180 |
|
|
|
|
|
Netzwerk 4: 4M1 Rotary table 180-0 U "M05 4M1 SEQ run HP" U #tmp_seq_cmd_onoff O "HMI KEY".P05."4M1".Manual_Jog_output_HP = #Support.bit_4M1_Enbl_180_0
U #Support.bit_4M1_Enbl_180_0 UN "E05 4M1 B42 Pos1" UN #Support.bit_4M1_Limit_Stop_reached = #Support.bit_4M1_CMD_180_0 |
|
|
|
|
|
Netzwerk 5: 4M1 Assign set value CLR = #tmp_cmd_start U #Support.bit_4M1_CMD_0_180 SPBN m001 L #Support.Int_4M1_speed_0_180 ITD DTR L 14.4 *R T #tmp_cmd_speed UN #Support.bit_4M1_Error = #tmp_cmd_start SPA m002 m001: U #Support.bit_4M1_CMD_180_0 SPBN m002 L #Support.Int_4M1_speed_180_0 ITD DTR L -14.4 *R T #tmp_cmd_speed UN #Support.bit_4M1_Error = #tmp_cmd_start m002: CALL #"4M1_SINA_SPEED" Execute :=#tmp_cmd_start Velocity :=#tmp_cmd_speed LAddrSP :="+5-4M1~PROFINET-Schnittstelle~Standard_Telegramm_20" LAddrAV :="+5-4M1~PROFINET-Schnittstelle~Standard_Telegramm_20" FactRPM :=1440.0 AckFlt :="HMI KEY".PRS.F1_AckKey Error :=#Support.bit_4M1_Error ErrorId :=#Support.Int_4M1_ErrorId DiagLd :=#Support.Wrd_4M1_DiagId Busy :=#Support.bit_4M1_Busy VeloAct :=#Support.Rel_4M1_VeloAct PwrInhibit :=#Support.bit_4M1_PwrInhbt |
|
|
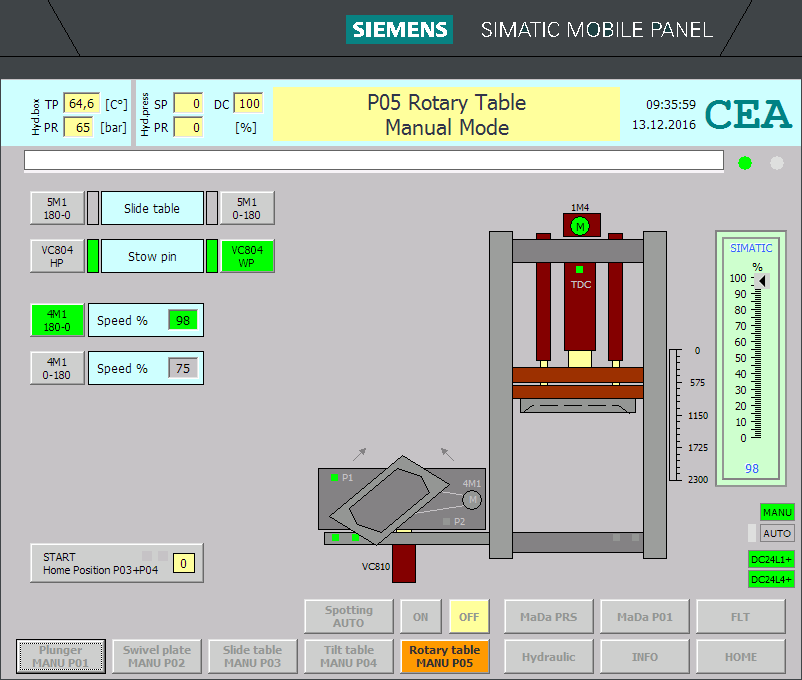
FB71 MANU P05 : Rotary Table Manual Mode |
|
|
|
|
|
Netzwerk 1: Fault transfer 00_15 L "DI MAIN P05".FLT."1_fault_00_15" T #"1_FAULT_00_15" L "DI MAIN P05".FLT."2_fault_00_15" T #"2_FAULT_00_15" |
|
|
|
|
|
Netzwerk 2: 1_X0 4M1 Rotary table Enable U "E00 DC24L4 E9003" U "E05 VC804 B45 HP" U "E03 HC800 B52 WP" UN "DI MAIN P05".FLT."1_fault_00_15".%X0 = "HMI KEY".P05."4M1".Enbl_WP = "HMI KEY".P05."4M1".Enbl_HP |
|
|
|
|
|
Netzwerk 3: 1_X1 VC804 Stow pin rotary table Enable U "E00 DC24L4 E9003" UN "DI MAIN P05".FLT."1_fault_00_15".%X2 = "HMI KEY".P05.VC804.Enbl_HP = "HMI KEY".P05.VC804.Enbl_WP |
|
|
|
|
|
Netzwerk 4: P05 Monitoring manual operation *** UN #ST_MANU BEB
U #HMI_HOM_POS U "M01 HomPos" FP #HMI_HomPos_FP = "M03 Init"
U #SUPPORT_MANU // in this system irrelevant BEB |
|
|
|
|
|
Netzwerk 5: 4M1 Set point speed U "HMI KEY".P05."4M1".F14_set_rapid_traverse R "HMI KEY".P05."4M1".Support.Speed_WP_on R "HMI KEY".P05."4M1".Support.Speed_HP_on SPB m073 U "HMI KEY".P05."4M1".F10_set_speed_HP SPBN m070 S "HMI KEY".P05."4M1".Support.Speed_HP_on R "HMI KEY".P05."4M1".Support.Speed_WP_on R "HMI KEY".P05."4M1".Support.Pressure_WP_on R "HMI KEY".P05."4M1".Support.Pressure_HP_on m077: L "DI OUT P05".Support.Int_4M1_speed_180_0 T "DI OUT PRS".MaDa.Slider_ControlValue BEA m070: U "HMI KEY".P05."4M1".Support.Speed_HP_on SPBN m071 L "DI OUT P05".Support.Int_4M1_SavePos L "DI OUT P05".Support.Int_4M1_speed_180_0 T "DI OUT P05".Support.Int_4M1_SavePos XOW SPZ m076 L "DI OUT P05".Support.Int_4M1_speed_180_0 UW O <>0 O ==0 SPB m077 BEA m076: L "DI OUT PRS".MaDa.Slider_ControlValue T "DI OUT P05".Support.Int_4M1_speed_180_0
m071: U "HMI KEY".P05."4M1".F11_set_speed_WP SPBN m072 S "HMI KEY".P05."4M1".Support.Speed_WP_on R "HMI KEY".P05."4M1".Support.Speed_HP_on R "HMI KEY".P05."4M1".Support.Pressure_WP_on R "HMI KEY".P05."4M1".Support.Pressure_HP_on m075: L "DI OUT P05".Support.Int_4M1_speed_0_180 T "DI OUT PRS".MaDa.Slider_ControlValue BEA m072: U "HMI KEY".P05."4M1".Support.Speed_WP_on SPBN m073 L "DI OUT P05".Support.Int_4M1_SavePos L "DI OUT P05".Support.Int_4M1_speed_0_180 T "DI OUT P05".Support.Int_4M1_SavePos XOW SPZ m074 L "DI OUT P05".Support.Int_4M1_speed_0_180 UW O <>0 O ==0 SPB m075 BEA m074: L "DI OUT PRS".MaDa.Slider_ControlValue T "DI OUT P05".Support.Int_4M1_speed_0_180 |
|
|
|
|
|
Netzwerk 6: VC804 Stow pin Execute manual operation m073: U "HMI KEY".P05.VC804.F1_HP U "HMI KEY".P05.VC804.Enbl_HP = "HMI KEY".P05.VC804.Manual_Jog_output_HP
U "HMI KEY".P05.VC804.F2_WP U "HMI KEY".P05.VC804.Enbl_HP = "HMI KEY".P05.VC804.Manual_Jog_output_WP |
|
|
|
|
|
Netzwerk 7: 4M1 Execute manual operation U "HMI KEY".P05."4M1".F1_HP U "HMI KEY".P05."4M1".Enbl_HP = "HMI KEY".P05."4M1".Manual_Jog_output_HP
U "HMI KEY".P05."4M1".F2_WP U "HMI KEY".P05."4M1".Enbl_WP = "HMI KEY".P05."4M1".Manual_Jog_output_WP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|