

|
FB SAFE GLB |

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
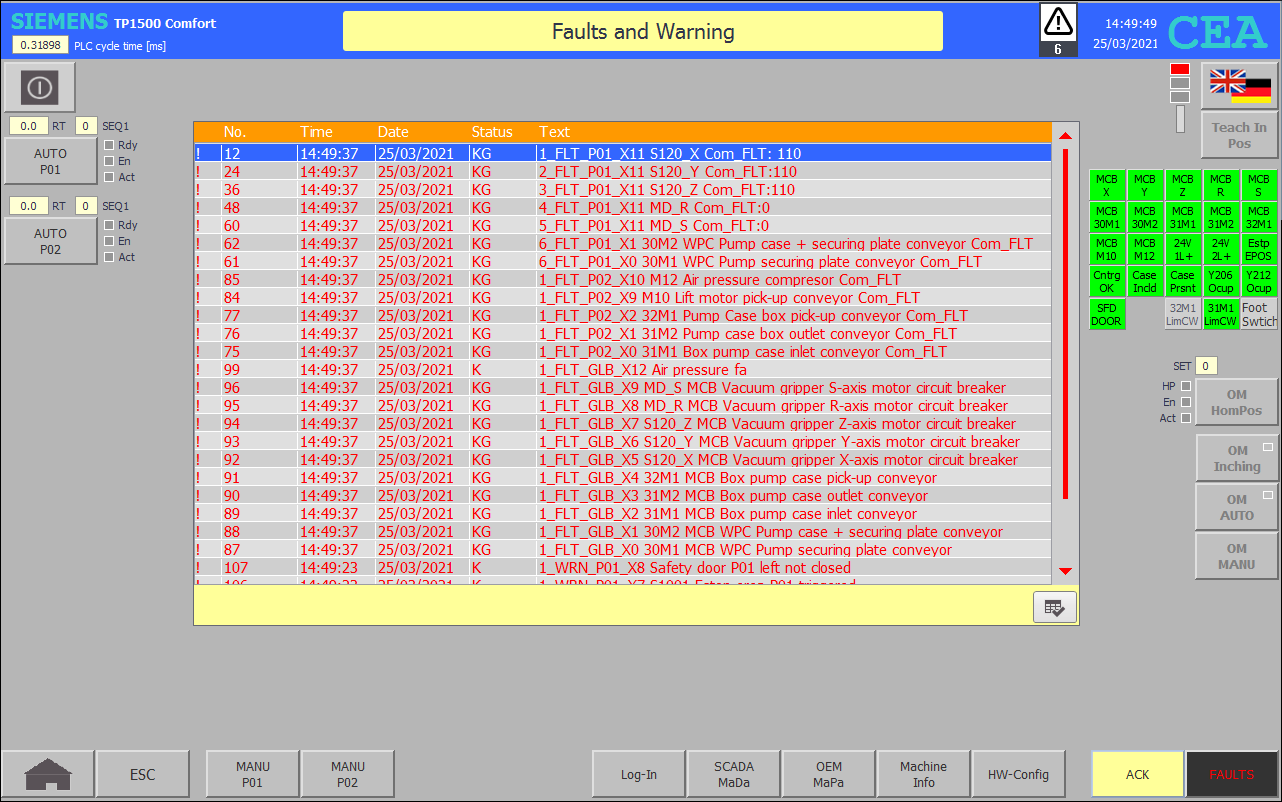
FB37 FLT P01 : Faults and warning P01 |
|
|
|
|
|
Network 1: SEQ Faults acknowledgment IF #FLT_MODULE AND "M00 FLT CmpltMaACK Imp" THEN "DI MAIN P01".SEQ1.SSM.S."1_FAULT_00_15" := "DI MAIN P01".SET.SSM.S."1_FAULT_00_15" := 0; END_IF; |
|
|
|
|
|
Network 2: 1_FLT_P01_X0_X11 S120_X Vacuum gripper #"1_FAULT_00_15".%X0 := "DI OUT P01".S120_X.DRV.MC_Power.Error; #"1_FAULT_00_15".%X1 := "DI OUT P01".S120_X.DRV.MC_Reset.Error; #"1_FAULT_00_15".%X2 := "DI OUT P01".S120_X.DRV.MC_Home.Error; #"1_FAULT_00_15".%X3 := "DI OUT P01".S120_X.DRV.MC_Halt.Error; #"1_FAULT_00_15".%X4 := "DI OUT P01".S120_X.DRV.MC_MoveAbsolute.Error; #"1_FAULT_00_15".%X5 := "DI OUT P01".S120_X.DRV.MC_MoveRelative.Error; #"1_FAULT_00_15".%X6 := "DI OUT P01".S120_X.DRV.MC_MoveJog.Error; #"1_FAULT_00_15".%X7 := "DI OUT P01".S120_X.TO_FAULT_00_07.%X0; // #AXIS.StatusDrive.Error; #"1_FAULT_00_15".%X8 := "DI OUT P01".S120_X.TO_FAULT_00_07.%X1; // #AXIS.StatusWord.%X1; #"1_FAULT_00_15".%X9 := "DI OUT P01".S120_X.TO_FAULT_00_07.%X2; // NOT #AXIS.StatusDrive.CommunicationOK; #"1_FAULT_00_15".%X10 := "DI OUT P01".S120_X.TO_FAULT_00_07.%X3; // Acce_Dece_TON.Q; #"1_FAULT_00_15".%X11 := "DI OUT P01".S120_X.Com_FLT; #"1_FAULT_00_15".%X12 := "DI OUT P01".S120_X.TO_FAULT_00_07.%X4; // SetVelo = 0.0 (still stand) |
|
|
|
|
|
Network 3: 2_FLT_P01_X0_X11 S120_Y Vacuum gripper #"2_FAULT_00_15".%X0 := "DI OUT P01".S120_Y.DRV.MC_Power.Error; #"2_FAULT_00_15".%X1 := "DI OUT P01".S120_Y.DRV.MC_Reset.Error; #"2_FAULT_00_15".%X2 := "DI OUT P01".S120_Y.DRV.MC_Home.Error; #"2_FAULT_00_15".%X3 := "DI OUT P01".S120_Y.DRV.MC_Halt.Error; #"2_FAULT_00_15".%X4 := "DI OUT P01".S120_Y.DRV.MC_MoveAbsolute.Error; #"2_FAULT_00_15".%X5 := "DI OUT P01".S120_Y.DRV.MC_MoveRelative.Error; #"2_FAULT_00_15".%X6 := "DI OUT P01".S120_Y.DRV.MC_MoveJog.Error; #"2_FAULT_00_15".%X7 := "DI OUT P01".S120_Y.TO_FAULT_00_07.%X0; // #AXIS.StatusDrive.Error; #"2_FAULT_00_15".%X8 := "DI OUT P01".S120_Y.TO_FAULT_00_07.%X1; // #AXIS.StatusWord.%X1; #"2_FAULT_00_15".%X9 := "DI OUT P01".S120_Y.TO_FAULT_00_07.%X2; // NOT #AXIS.StatusDrive.CommunicationOK; #"2_FAULT_00_15".%X10 := "DI OUT P01".S120_Y.TO_FAULT_00_07.%X3; // Acce_Dece_TON.Q; #"2_FAULT_00_15".%X11 := "DI OUT P01".S120_Y.Com_FLT; #"2_FAULT_00_15".%X12 := "DI OUT P01".S120_Y.TO_FAULT_00_07.%X4; // SetVelo = 0.0 (still stand) |
|
|
|
|
|
Network 4: 3_FLT_P01_X0_X11 S120_Z Vacuum gripper #"3_FAULT_00_15".%X0 := "DI OUT P01".S120_Z.DRV.MC_Power.Error; #"3_FAULT_00_15".%X1 := "DI OUT P01".S120_Z.DRV.MC_Reset.Error; #"3_FAULT_00_15".%X2 := "DI OUT P01".S120_Z.DRV.MC_Home.Error; #"3_FAULT_00_15".%X3 := "DI OUT P01".S120_Z.DRV.MC_Halt.Error; #"3_FAULT_00_15".%X4 := "DI OUT P01".S120_Z.DRV.MC_MoveAbsolute.Error; #"3_FAULT_00_15".%X5 := "DI OUT P01".S120_Z.DRV.MC_MoveRelative.Error; #"3_FAULT_00_15".%X6 := "DI OUT P01".S120_Z.DRV.MC_MoveJog.Error; #"3_FAULT_00_15".%X7 := "DI OUT P01".S120_Z.TO_FAULT_00_07.%X0; // #AXIS.StatusDrive.Error; #"3_FAULT_00_15".%X8 := "DI OUT P01".S120_Z.TO_FAULT_00_07.%X1; // #AXIS.StatusWord.%X1; #"3_FAULT_00_15".%X9 := "DI OUT P01".S120_Z.TO_FAULT_00_07.%X2; // NOT #AXIS.StatusDrive.CommunicationOK; #"3_FAULT_00_15".%X10 := "DI OUT P01".S120_Z.TO_FAULT_00_07.%X3; // Acce_Dece_TON.Q; #"3_FAULT_00_15".%X11 := "DI OUT P01".S120_Z.Com_FLT; #"3_FAULT_00_15".%X12 := "DI OUT P01".S120_Z.TO_FAULT_00_07.%X4; // SetVelo = 0.0 (still stand) |
|
|
|
|
|
Network 5: 4_FLT_P01_X0_X11 MD_R Vacuum gripper #"4_FAULT_00_15".%X0 := "DI OUT P01".MD_R.DRV.MC_Power.Error; #"4_FAULT_00_15".%X1 := "DI OUT P01".MD_R.DRV.MC_Reset.Error; #"4_FAULT_00_15".%X2 := "DI OUT P01".MD_R.DRV.MC_Home.Error; #"4_FAULT_00_15".%X3 := "DI OUT P01".MD_R.DRV.MC_Halt.Error; #"4_FAULT_00_15".%X4 := "DI OUT P01".MD_R.DRV.MC_MoveAbsolute.Error; #"4_FAULT_00_15".%X5 := "DI OUT P01".MD_R.DRV.MC_MoveRelative.Error; #"4_FAULT_00_15".%X6 := "DI OUT P01".MD_R.DRV.MC_MoveJog.Error; #"4_FAULT_00_15".%X7 := "DI OUT P01".MD_R.TO_FAULT_00_07.%X0; // #AXIS.StatusDrive.Error; #"4_FAULT_00_15".%X8 := "DI OUT P01".MD_R.TO_FAULT_00_07.%X1; // #AXIS.StatusWord.%X1; #"4_FAULT_00_15".%X9 := "DI OUT P01".MD_R.TO_FAULT_00_07.%X2; // NOT #AXIS.StatusDrive.CommunicationOK; #"4_FAULT_00_15".%X10 := "DI OUT P01".MD_R.TO_FAULT_00_07.%X3; // Acce_Dece_TON.Q; #"4_FAULT_00_15".%X11 := "DI OUT P01".MD_R.Com_FLT; #"4_FAULT_00_15".%X12 := "DI OUT P01".MD_R.TO_FAULT_00_07.%X4; // SetVelo = 0.0 (still stand) |
|
|
|
|
|
Network 6: 5_FLT_P01_X0_X11 MD_S Vacuum gripper #"5_FAULT_00_15".%X0 := "DI OUT P01".MD_S.DRV.MC_Power.Error; #"5_FAULT_00_15".%X1 := "DI OUT P01".MD_S.DRV.MC_Reset.Error; #"5_FAULT_00_15".%X2 := "DI OUT P01".MD_S.DRV.MC_Home.Error; #"5_FAULT_00_15".%X3 := "DI OUT P01".MD_S.DRV.MC_Halt.Error; #"5_FAULT_00_15".%X4 := "DI OUT P01".MD_S.DRV.MC_MoveAbsolute.Error; #"5_FAULT_00_15".%X5 := "DI OUT P01".MD_S.DRV.MC_MoveRelative.Error; #"5_FAULT_00_15".%X6 := "DI OUT P01".MD_S.DRV.MC_MoveJog.Error; #"5_FAULT_00_15".%X7 := "DI OUT P01".MD_S.TO_FAULT_00_07.%X0; // #AXIS.StatusDrive.Error; #"5_FAULT_00_15".%X8 := "DI OUT P01".MD_S.TO_FAULT_00_07.%X1; // #AXIS.StatusWord.%X1; #"5_FAULT_00_15".%X9 := "DI OUT P01".MD_S.TO_FAULT_00_07.%X2; // NOT #AXIS.StatusDrive.CommunicationOK; #"5_FAULT_00_15".%X10 := "DI OUT P01".MD_S.TO_FAULT_00_07.%X3; // Acce_Dece_TON.Q; #"5_FAULT_00_15".%X11 := "DI OUT P01".MD_S.Com_FLT; #"5_FAULT_00_15".%X12 := "DI OUT P01".MD_S.TO_FAULT_00_07.%X4; // SetVelo = 0.0 (still stand) |
|
|
|
|
|
Network 7: 6_FLT_P01_X0 30M1 WPC Pump securing plate conveyor #"6_FAULT_00_15".%X0 := "DI OUT P01"."30M1".Com_FLT; |
|
|
|
|
|
Network 8: 6_FLT_P01_X1 30M2 WPC Pump case + securing plate conveyor #"6_FAULT_00_15".%X1 := "DI OUT P01"."30M2".Com_FLT; |
|
|
|
|
|
Network 9: 6_FLT_P01_X2 Y200 Gripper vacuum valve #"6_FAULT_00_15".%X2 := "DI OUT P01".Y200.Com_FLT; |
|
|
|
|
|
Network 10: 6_FLT_P01_X3 Y204 WPC pre-stopper pump securing plate conveyor #"6_FAULT_00_15".%X3 := "DI OUT P01".Y204.Com_FLT; |
|
|
|
|
|
Network 11: 6_FLT_P01_X4 Y206 WPC stopper pump securing plate conveyor #"6_FAULT_00_15".%X4 := "DI OUT P01".Y206.Com_FLT; |
|
|
|
|
|
Network 12: 6_FLT_P01_X5 Y210 WPC pre-stopper pump case conveyor #"6_FAULT_00_15".%X5 := "DI OUT P01".Y210.Com_FLT; |
|
|
|
|
|
Network 13: 6_FLT_P01_X6 Y212 WPC stopper pump case conveyor #"6_FAULT_00_15".%X6 := "DI OUT P01".Y212.Com_FLT; |
|
|
|
|
|
Network 14: 6_FLT_P01_X7 C214 Pusher NOK slide #"6_FAULT_00_15".%X7 := "DI OUT P01".C214.Com_FLT; |
|
|
|
|
|
Network 15: 6_FLT_P01_X8 #"6_FAULT_00_15".%X8 := FALSE; |
|
|
|
|
|
Network 16: 6_FLT_P01_X9 #"6_FAULT_00_15".%X9 := FALSE; |
|
|
|
|
|
Network 17: 6_FLT_P01_X10 Query Gripper Part Present at home pos. #"6_FAULT_00_15".%X10 := "DI MAIN P01".SET.SSM.S."1_FAULT_00_15".%X0; |
|
|
|
|
|
Network 18: 6_FLT_P01_X11 SEQ1 pump case inclined #"6_FAULT_00_15".%X11 := "DI MAIN P01".SEQ1.SSM.S."1_FAULT_00_15".%X0; |
|
|
|
|
|
Network 19: 6_FLT_P01_X12 SEQ1 Part left behind on WPC case conveyor #"6_FAULT_00_15".%X12 := "DI MAIN P01".SEQ1.SSM.S."1_FAULT_00_15".%X1; |
|
|
|
|
|
Network 20: 6_FLT_P01_X13 SEQ1 Part left behind on WPC securing plate conveyor #"6_FAULT_00_15".%X13 := "DI MAIN P01".SEQ1.SSM.S."1_FAULT_00_15".%X2; |
|
|
|
|
|
Network 21: 6_FLT_P01_X14 #"6_FAULT_00_15".%X14 := FALSE; |
|
|
|
|
|
Network 22: 6_FLT_P01_X15 #"6_FAULT_00_15".%X15 := FALSE; |
|
|
|
|
|
Network 23: 1_WRN_P01_X0 SEQ1 set run time exceeded #"1_WARN_00_15".%X0 := "DI MAIN P01".MoDA.RunTimeCntr_seq1 > "DI MAIN P01".MoDA.RunTimeSetP_seq1; |
|
|
|
|
|
Network 24: 1_WRN_P01_X1 S120_X reference Nok #"1_WARN_00_15".%X1 := NOT "DI OUT P01".S120_X.DRV.Support.HomeDone; |
|
|
|
|
|
Network 25: 1_WRN_P01_X2 S120_Y reference Nok #"1_WARN_00_15".%X2 := NOT "DI OUT P01".S120_Y.DRV.Support.HomeDone; |
|
|
|
|
|
Network 26: 1_WRN_P01_X3 S120_Z reference Nok #"1_WARN_00_15".%X3 := NOT "DI OUT P01".S120_Z.DRV.Support.HomeDone; |
|
|
|
|
|
Network 27: 1_WRN_P01_X4 MD_R reference Nok #"1_WARN_00_15".%X4 := NOT "DI OUT P01".MD_R.DRV.Support.HomeDone; |
|
|
|
|
|
Network 28: 1_WRN_P01_X5 MD_S reference Nok #"1_WARN_00_15".%X5 := NOT "DI OUT P01".MD_S.DRV.Support.HomeDone; |
|
|
|
|
|
Network 29: 1_WRN_P01_X6 S1000 Estop HMI triggered #"1_WARN_00_15".%X6 := NOT "E00 S1000 EstopHMI CH1"; |
|
|
|
|
|
Network 30: 1_WRN_P01_X7 S1001 Estop area P01 triggered #"1_WARN_00_15".%X7 := NOT "E00 S1001 EstopP01 CH1"; |
|
|
|
|
|
Network 31: 1_WRN_P01_X8 Safety door P01 left not closed #"1_WARN_00_15".%X8 := NOT "E00 S1003 SftyDorP01L CH1"; |
|
|
|
|
|
Network 32: 1_WRN_P01_X9 Safety door P01 front not closed #"1_WARN_00_15".%X9 := NOT "E00 S1004 SftyDorP01F CH1"; |
|
|
|
|
|
FB47 FLT P02 : Faults and warning P02 |
|
|
|
|
|
Network 1: SEQ Faults acknowledgment IF #FLT_MODULE AND "M00 FLT CmpltMaACK Imp" THEN "DI MAIN P02".SEQ1.SSM.S."1_FAULT_00_15" := 0; "DatOfMod".P02.STS.ReadHead_nOK := "DI OUT P02"."31M1_Interface".DRV.VC.BLK_MOV_Error_ToPC := "DI OUT P02"."32M1_Interface".DRV.VC.BLK_MOV_Error_ToPC := FALSE; END_IF; |
|
|
|
|
|
Network 2: 1_FLT_P02_X0 31M1 Box pump case inlet conveyor #"1_FAULT_00_15".%X0 := "DI OUT P02"."31M1".Com_FLT; |
|
|
|
|
|
Network 3: 1_FLT_P02_X1 31M2 Box pump case outlet conveyor #"1_FAULT_00_15".%X1 := "DI OUT P02"."31M2".Com_FLT; |
|
|
|
|
|
Network 4: 1_FLT_P02_X2 32M1 Box pump Case Pick-up conveyor #"1_FAULT_00_15".%X2 := "DI OUT P02"."32M1".Com_FLT; |
|
|
|
|
|
Network 5: 1_FLT_P02_X3 C400 Cylinder pick-up conveyor #"1_FAULT_00_15".%X3 := "DI OUT P02".C400.Com_FLT; |
|
|
|
|
|
Network 6: 1_FLT_P02_X4 C402 Box fixing unit #"1_FAULT_00_15".%X4 := "DI OUT P02".C402.Com_FLT; |
|
|
|
|
|
Network 7: 1_FLT_P02_X5 Y404 Box pre-stopper inlet conveyor #"1_FAULT_00_15".%X5 := "DI OUT P02".Y404.Com_FLT; |
|
|
|
|
|
Network 8: 1_FLT_P02_X6 Y406 Box stopper inlet conveyor #"1_FAULT_00_15".%X6 := "DI OUT P02".Y406.Com_FLT; |
|
|
|
|
|
Network 9: 1_FLT_P02_X7 Y410 Box pre-stopper outlet conveyor #"1_FAULT_00_15".%X7 := "DI OUT P02".Y410.Com_FLT; |
|
|
|
|
|
Network 10: 1_FLT_P02_X8 Y412 Box stopper outlet conveyor #"1_FAULT_00_15".%X8 := "DI OUT P02".Y412.Com_FLT; |
|
|
|
|
|
Network 11: 1_FLT_P02_X9 M10 Lift motor pick-up conveyor #"1_FAULT_00_15".%X9 := "DI OUT P02".M10.Com_FLT; |
|
|
|
|
|
Network 12: 1_FLT_P02_X10 M12 Air pressure compressor #"1_FAULT_00_15".%X10 := "DI OUT P02".M12.Com_FLT; |
|
|
|
|
|
Network 13: 1_FLT_P02_X11 31M1_INTRFC.DRV.BLK_MOV_Error #"1_FAULT_00_15".%X11 := "DI OUT P02"."31M1_Interface".DRV.VC.BLK_MOV_Error_ToPC; |
|
|
|
|
|
Network 14: 1_FLT_P02_X12 32M1_INTRFC.DRV.BLK_MOV_Error #"1_FAULT_00_15".%X12 := "DI OUT P02"."32M1_Interface".DRV.VC.BLK_MOV_Error_ToPC; |
|
|
|
|
|
Network 15: 1_FLT_P02_X13 SCADA Box_Data.Box_Code error #"1_FAULT_00_15".%X13 := "DatOfMod".P02.STS.ReadHead_nOK; |
|
|
|
|
|
Network 16: 1_FLT_P02_X14 #"1_FAULT_00_15".%X14 := FALSE; |
|
|
|
|
|
Network 17: 1_FLT_P02_X15 #"1_FAULT_00_15".%X15 := FALSE; |
|
|
|
|
|
Network 18: 1_WRN_P02_X0 SEQ1 set run time exceeded #"1_WARN_00_15".%X0 := "DI MAIN P02".MoDA.RunTimeCntr_seq1 > "DI MAIN P02".MoDA.RunTimeSetP_seq1; |
|
|
|
|
|
Network 19: 1_WRN_P02_X0 SEQ1 set run time exceeded #"1_WARN_00_15".%X1 := NOT "E00 S1005 SftyDorP02R CH1"; |
|
|
|
|
|
Network 20: 1_WRN_P02_X2 Estop erea P02 triggered #"1_WARN_00_15".%X2 := NOT "E00 S1002 EstopP02 CH1"; |
|
|
|
|
|
Network 21: 1_WRN_P02_X3 #"1_WARN_00_15".%X3 := FALSE; |
|
|
|
|
|
Network 22: Complete module fault message "DatOfMod".P02.STS."1_ModuleFlr_00_31" := DW#16#FFFFFFFF AND (SHL_DWORD(IN := #"1_FAULT_00_15", N := 16) OR #"2_FAULT_00_15"); "DatOfMod".P02.STS."2_ModuleFlr_00_31" := DW#16#FFFFFFFF AND (SHL_DWORD(IN := #"3_FAULT_00_15", N := 16) OR #"4_FAULT_00_15"); "DatOfMod".P02.STS."3_ModuleFlr_00_31" := DW#16#FFFFFFFF AND (SHL_DWORD(IN := #"5_FAULT_00_15", N := 16) OR #"6_FAULT_00_15"); #FLT_MODULE := 0 <> ("DatOfMod".P02.STS."1_ModuleFlr_00_31" OR "DatOfMod".P02.STS."2_ModuleFlr_00_31" OR "DatOfMod".P02.STS."3_ModuleFlr_00_31"); |
|