

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OB100 Start Up : Original Equipment Manufacturer |
|
|
|
|
|
Network 1: Pre-Setting "DI MAIN GLB".M00.TON_Login.PT := "DI MAIN GLB".M00.TON_Login.PT := t#300s; "DI MAIN P01".M00.ProductCounter.DlyOnReset.PT := t#1.5s; "DI MAIN P01".SEQ1.RunTimeSetValue := 2500; "DI MAIN P02".SEQ1.RunTimeSetValue := 1500; |
|
|
|
|
|
Network 2: P01 Delta Picker 3D default // Global default values "DI OUT P01".DELTA_PICKER.DRV.MC_MoveCircularAbsolute.CoordSystem := "DI OUT P01".DELTA_PICKER.DRV.MC_MoveCircularRelative.CoordSystem := "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearAbsolute.CoordSystem := "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearRelative.CoordSystem := 0; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearAbsolute.Velocity := "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearRelative.Velocity := "DI OUT P01".DELTA_PICKER.DRV.MC_MoveCircularAbsolute.Velocity := "DI OUT P01".DELTA_PICKER.DRV.MC_MoveCircularRelative.Velocity := -1.0; // MC_MoveLinarAbsolute "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearAbsolute.Position[1] := 756.46; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearAbsolute.Position[2] := 1039.45; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearAbsolute.Position[3] := 850.0; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearAbsolute.Position[4] := 90.0; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearAbsolute.BufferMode := 1; // MC_MoveLinearRelative "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearRelative.Distance[1] := 0.0; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearRelative.Distance[2] := -854.42; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearRelative.Distance[3] := 0.0; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearRelative.Distance[4] := -90.0; "DI OUT P01".DELTA_PICKER.DRV.MC_MoveLinearRelative.BufferMode := 1; |
|
|
|
|
|
Network 3: P01 Pre-Setting "DI OUT P01".S210A1.DRV.Support.SW_EndLim_MaxPos := "+1-S210A1".PositionLimits_SW.MaxPosition - 2.0; "DI OUT P01".S210A1.DRV.Support.SW_EndLim_MinPos := "+1-S210A1".PositionLimits_SW.MinPosition + 2.0; "DI OUT P01".Manual.S210A1.Positive_Scaled_Value := 120.0; "DI OUT P01".Manual.S210A1.Shared_Zero_Scaled_Value := 0.0; "DI OUT P01".Manual.S210A1.Negative_Scaled_Value := -120.0;
"DI OUT P01".S210A2.DRV.Support.SW_EndLim_MaxPos := "+1-S210A2".PositionLimits_SW.MaxPosition - 2.0; "DI OUT P01".S210A2.DRV.Support.SW_EndLim_MinPos := "+1-S210A2".PositionLimits_SW.MinPosition + 2.0; "DI OUT P01".Manual.S210A2.Positive_Scaled_Value := 120.0; "DI OUT P01".Manual.S210A2.Shared_Zero_Scaled_Value := 0.0; "DI OUT P01".Manual.S210A2.Negative_Scaled_Value := -120.0;
"DI OUT P01".S210A3.DRV.Support.SW_EndLim_MaxPos := "+1-S210A3".PositionLimits_SW.MaxPosition - 2.0; "DI OUT P01".S210A3.DRV.Support.SW_EndLim_MinPos := "+1-S210A3".PositionLimits_SW.MinPosition + 2.0; "DI OUT P01".Manual.S210A3.Positive_Scaled_Value := 120.0; "DI OUT P01".Manual.S210A3.Shared_Zero_Scaled_Value := 0.0; "DI OUT P01".Manual.S210A3.Negative_Scaled_Value := -120.0;
"DI OUT P01".V90A4.DRV.Support.SW_EndLim_MaxPos := "+1-V90A4".PositionLimits_SW.MaxPosition; "DI OUT P01".V90A4.DRV.Support.SW_EndLim_MinPos := "+1-V90A4".PositionLimits_SW.MinPosition; "DI OUT P01".Manual.V90A4.Positive_Scaled_Value := 179.999; "DI OUT P01".Manual.V90A4.Shared_Zero_Scaled_Value := 0.0; "DI OUT P01".Manual.V90A4.Negative_Scaled_Value := -180.0;
"DI OUT P01".TRACK_CONVEYOR.DRV.Support.Modulo_Length := "DI OUT P01".Manual.G120C.Positive_Scaled_Value := "+1-G120C".Modulo.Length; "DI OUT P01".Manual.G120C.Shared_Zero_Scaled_Value := "+1-G120C".Modulo.StartValue; |
|
|
|
|
|
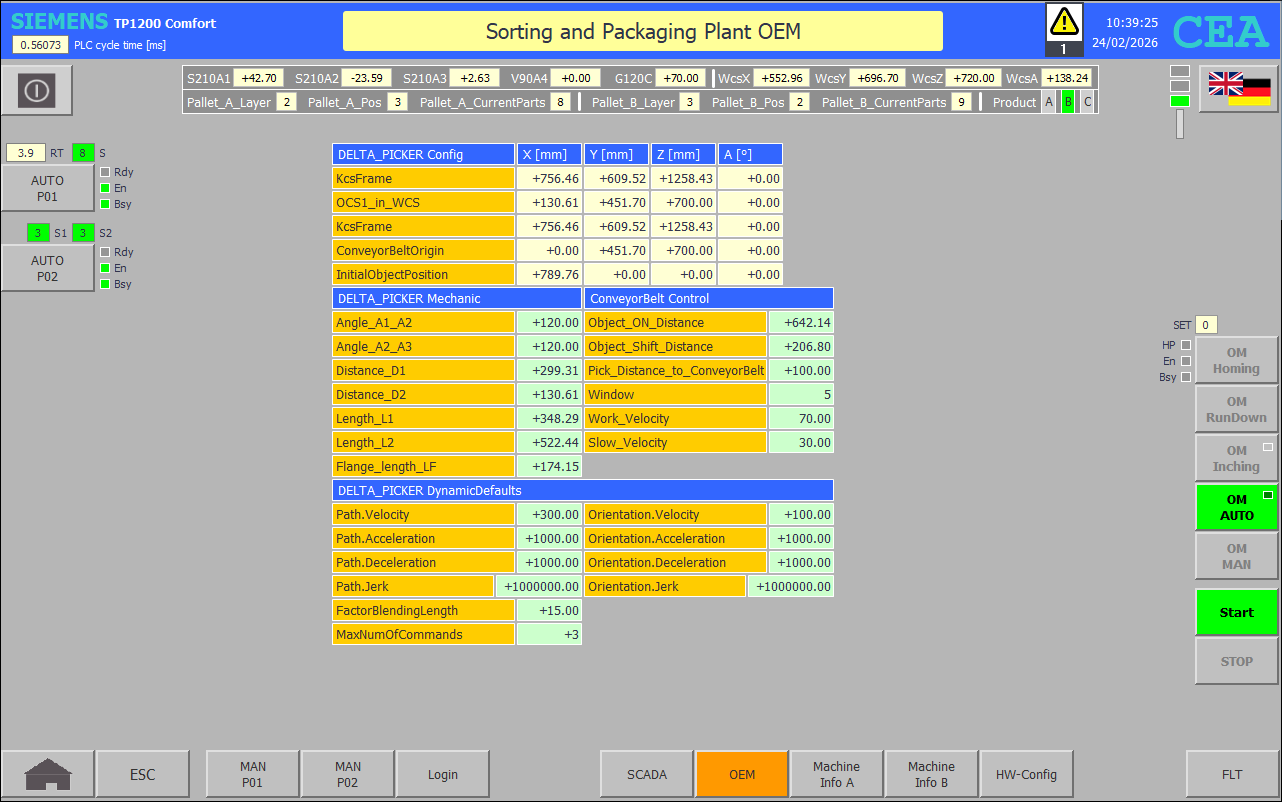
Network 4: P01 Plant Info OEM "HMI KEY".PlantInfo.KcsFrame.x := "+1-DELTA_PICKER".KcsFrame.x; "HMI KEY".PlantInfo.KcsFrame.y := "+1-DELTA_PICKER".KcsFrame.y; "HMI KEY".PlantInfo.KcsFrame.z := "+1-DELTA_PICKER".KcsFrame.z; "HMI KEY".PlantInfo.DynamicDefaults.Acceleration := "+1-DELTA_PICKER".DynamicDefaults.Path.Acceleration; "HMI KEY".PlantInfo.DynamicDefaults.Deceleration := "+1-DELTA_PICKER".DynamicDefaults.Path.Deceleration; "HMI KEY".PlantInfo.DynamicDefaults.Jerk := "+1-DELTA_PICKER".DynamicDefaults.Path.Jerk; "HMI KEY".PlantInfo.DynamicDefaults.Velocity := "+1-DELTA_PICKER".DynamicDefaults.Path.Velocity; "HMI KEY".PlantInfo.Orientation.Velocity := "+1-DELTA_PICKER".DynamicDefaults.Orientation.Velocity; "HMI KEY".PlantInfo.Orientation.Acceleration := "+1-DELTA_PICKER".DynamicDefaults.Orientation.Acceleration; "HMI KEY".PlantInfo.Orientation.Deceleration := "+1-DELTA_PICKER".DynamicDefaults.Orientation.Deceleration; "HMI KEY".PlantInfo.Orientation.Jerk := "+1-DELTA_PICKER".DynamicDefaults.Orientation.Jerk; "HMI KEY".PlantInfo.FactorBlendingLength := "+1-DELTA_PICKER".Transition.FactorBlendingLength; "HMI KEY".PlantInfo.MaxNumberOfCommands := "+1-DELTA_PICKER".MotionQueue.MaxNumberOfCommands; // Conveyor at WCS "DI OUT P01".TRACK_CONVEYOR.DRV.Support.Object_ON_Distance := 642.14; "DI OUT P01".TRACK_CONVEYOR.DRV.Support.Measuring_Shift_Distance := "HMI KEY".PlantInfo.Object_Shift_Distance := 206.80; "DI OUT P01".TRACK_CONVEYOR.DRV.MC_TrackConveyorBelt.ConveyorBeltOrigin.x := 0.0; // mm at WCS "DI OUT P01".TRACK_CONVEYOR.DRV.MC_TrackConveyorBelt.ConveyorBeltOrigin.y := 451.70; // mm WCS "DI OUT P01".TRACK_CONVEYOR.DRV.MC_TrackConveyorBelt.ConveyorBeltOrigin.z := 700.0; // mm at WCS "DI OUT P01".TRACK_CONVEYOR.DRV.MC_TrackConveyorBelt.ConveyorBeltOrigin.a := 0.0; // mm at WCS // Mechanic "HMI KEY".PlantInfo.Angle_A1_A2 := "+1-DELTA_PICKER".Kinematics.Parameter[5]; // 120.0° "HMI KEY".PlantInfo.Angle_A2_A3 := "+1-DELTA_PICKER".Kinematics.Parameter[6]; // 120.0° "HMI KEY".PlantInfo.Distance_D1 := "+1-DELTA_PICKER".Kinematics.Parameter[1]; // 299.31 mm "HMI KEY".PlantInfo.Distance_D2 := "+1-DELTA_PICKER".Kinematics.Parameter[4]; // 130.61 mm "HMI KEY".PlantInfo.Length_L1 := "+1-DELTA_PICKER".Kinematics.Parameter[2]; // 348.29 mm "HMI KEY".PlantInfo.Length_L2 := "+1-DELTA_PICKER".Kinematics.Parameter[3]; // 522.44 mm "HMI KEY".PlantInfo.Flange_length_LF := "+1-DELTA_PICKER".Kinematics.Parameter[7]; // 174.15 // OCS1 in the WCS only on HMI "HMI KEY".PlantInfo.Object_Offset := "HMI KEY".PlantInfo.OCS1_in_WCS.x := "+1-DELTA_PICKER".OcsFrame[1].x; // 130.61 "HMI KEY".PlantInfo.OCS1_in_WCS.y := "+1-DELTA_PICKER".OcsFrame[1].y; // 451.70 "HMI KEY".PlantInfo.OCS1_in_WCS.z := "+1-DELTA_PICKER".OcsFrame[1].z; // 700.00 "HMI KEY".PlantInfo.OCS1_in_WCS.a := "+1-DELTA_PICKER".OcsFrame[1].a; // 0.0 |
|