

|
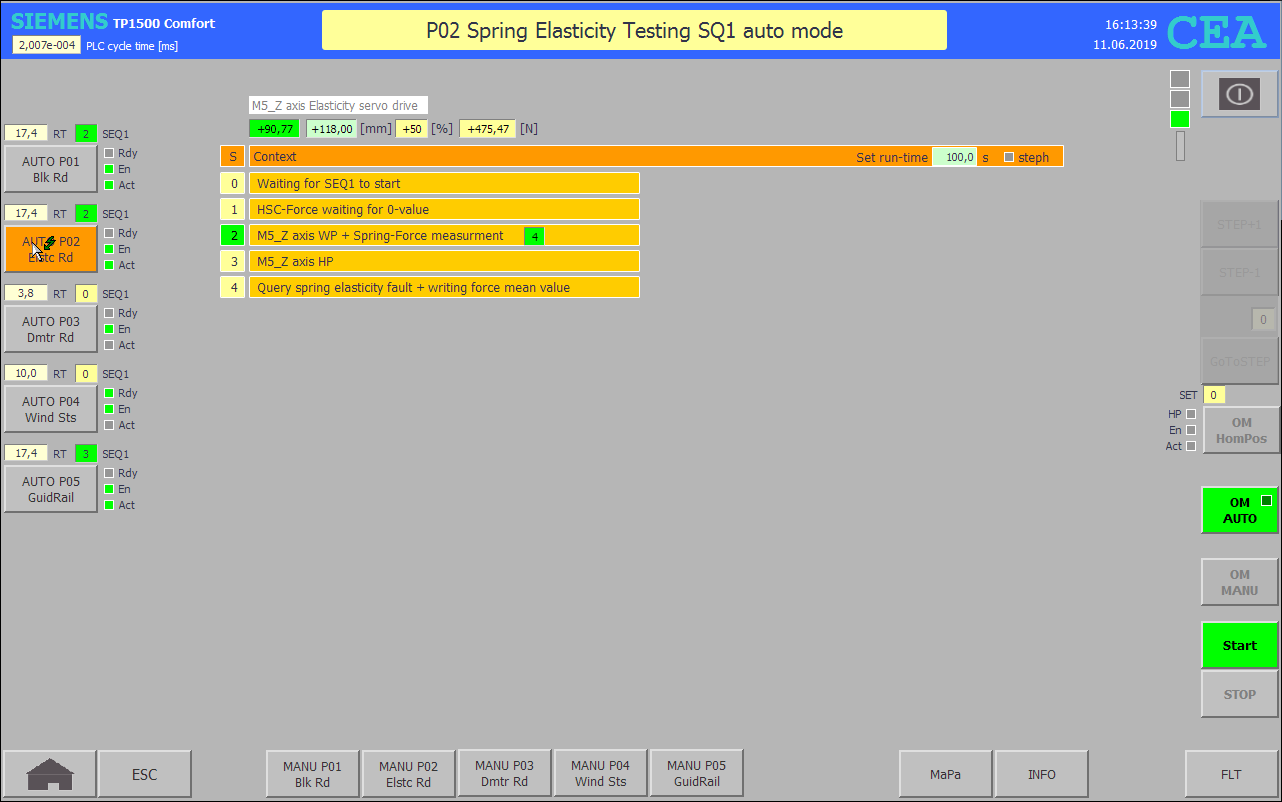
FB42 SEQ1 P02 : Spring elasticity reading - SEQ1 (slave 2) |
|
|
|
|
|
Netzwerk 1: Pre-Setting
"M02 RdyToStart" := "M02 HomPos" AND "DI MAIN P05".SEQ1.Shift_Register.%X8; |
|
|
|
|
|
Netzwerk 2: Execute SEQ1
#SSM1(STEP_PLS := "HMI KEY".P02.GLB.F17_StepPls, STEP_MNS := "HMI KEY".P02.GLB.F18_StepMns, GOTO_STEP := "HMI KEY".P02.GLB.F19_GoToStep, GOTO_STEP_NO := "HMI KEY".P02.GLB.GoToStep, MAX_STEP := 4); |
|
|
|
|
|
Netzwerk 3: Step jump distributor
CASE #SSM1.S.stepact OF 0: // Waiting for SEQ1 to start "M02 SEQ1 Active" := FALSE; #Index := 0; IF NOT "DI MAIN P05".SEQ1.Shift_Register.%X8 THEN "M02 Enbl toRTT" := TRUE; RETURN; END_IF; #SSM1.S.stepd := #SSM1.S.steps AND "M02 RdyToStart" AND "M02 Enbl frmRTT";
1: // HSC wait for stable start value "M02 SSM1 Active" := TRUE; IF #SSM1.S.stepfc THEN #Index := #Index + 1; #SSM1.S.c1.set := 6; RETURN; ELSE "M02 HSC OnOff" := TRUE; #SSM1.S.c1.start := "DI OUT P02".HSC_FORC_IO.UserStatusFlags.StatusDQ1; IF #SSM1.S.c1.done THEN "M02 Enbl frmRTT" := FALSE; #SSM1.S.stepd := TRUE; END_IF; END_IF;
2: // M5_Z axis move downward WP + spring elasticity measuring IF #SSM1.S.stepfc THEN #SSM1.S.c1.set := 5; "DI OUT P02".M5_Z.DRV.MC_MoveAbsolute.Position := "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5; "DI OUT P02".M5_Z.DRV.Support.SetVelo := "DI OUT P02".MANUAL.M5_Z.Set_TchInVelo_1; RETURN; ELSE IF "DI OUT P02".M5_Z.DRV.Support.ActPos - "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 >= "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 - "DI OUT P02".MANUAL.SpringFRC_F1.Offset AND NOT #M5_Z_ActPosL1_REg THEN "DI OUT P02".MANUAL.SpringFRC_F1.Measurement[#Index] := "DI OUT P02".HSC_FORC_IO.OUT.MeasuredValue; IF "DI OUT P02".MANUAL.SpringFRC_F1.Compensation < ABS("DI OUT P02".HSC_FORC_IO.OUT.MeasuredValue - "DI OUT P02".MANUAL.SpringFRC_F1.TrgtValue) THEN "DI MAIN P05".SEQ1.Shift_Register_BadParts.%X8 := TRUE; END_IF; ELSIF "DI OUT P02".M5_Z.DRV.Support.ActPos - "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 >= "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 - "DI OUT P02".MANUAL.SpringFRC_F2.Offset AND NOT #M5_Z_ActPosL2_REg THEN "DI OUT P02".MANUAL.SpringFRC_F2.Measurement[#Index] := "DI OUT P02".HSC_FORC_IO.OUT.MeasuredValue; IF "DI OUT P02".MANUAL.SpringFRC_F1.Compensation < ABS("DI OUT P02".HSC_FORC_IO.OUT.MeasuredValue - "DI OUT P02".MANUAL.SpringFRC_F2.TrgtValue) THEN "DI MAIN P05".SEQ1.Shift_Register_BadParts.%X8 := TRUE; END_IF; ELSIF "DI OUT P02".M5_Z.DRV.Support.ActPos - "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 >= "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 - "DI OUT P02".MANUAL.SpringFRC_F3.Offset AND NOT #M5_Z_ActPosL3_REg THEN "DI OUT P02".MANUAL.SpringFRC_F3.Measurement[#Index] := "DI OUT P02".HSC_FORC_IO.OUT.MeasuredValue; IF "DI OUT P02".MANUAL.SpringFRC_F1.Compensation < ABS("DI OUT P02".HSC_FORC_IO.OUT.MeasuredValue - "DI OUT P02".MANUAL.SpringFRC_F3.TrgtValue) THEN "DI MAIN P05".SEQ1.Shift_Register_BadParts.%X8 := TRUE; END_IF; ELSIF "DI OUT P02".M5_Z.DRV.Support.ActPos - "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 >= "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 - "DI OUT P02".MANUAL.SpringFRC_F4.Offset AND NOT #M5_Z_ActPosL4_REg THEN "DI OUT P02".MANUAL.SpringFRC_F4.Measurement[#Index] := "DI OUT P02".HSC_FORC_IO.OUT.MeasuredValue; IF "DI OUT P02".MANUAL.SpringFRC_F1.Compensation < ABS("DI OUT P02".HSC_FORC_IO.OUT.MeasuredValue - "DI OUT P02".MANUAL.SpringFRC_F4.TrgtValue) THEN "DI MAIN P05".SEQ1.Shift_Register_BadParts.%X8 := TRUE; END_IF; END_IF; #M5_Z_ActPosL1_REg := "DI OUT P02".M5_Z.DRV.Support.ActPos - "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 >= "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 - "DI OUT P02".MANUAL.SpringFRC_F1.Offset; #M5_Z_ActPosL2_REg := "DI OUT P02".M5_Z.DRV.Support.ActPos - "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 >= "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 - "DI OUT P02".MANUAL.SpringFRC_F2.Offset; #M5_Z_ActPosL3_REg := "DI OUT P02".M5_Z.DRV.Support.ActPos - "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 >= "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 - "DI OUT P02".MANUAL.SpringFRC_F3.Offset; #M5_Z_ActPosL4_REg := "DI OUT P02".M5_Z.DRV.Support.ActPos - "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 >= "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 - "DI OUT P02".MANUAL.SpringFRC_F4.Offset;
"M02 M5_Z GoToPosAbso" := NOT "DI OUT P02".M5_Z.HALT_01; #SSM1.S.c1.start := "DI OUT P02".M5_Z."MC MoveAbsolute".Done; #SSM1.S.stepd := #SSM1.S.c1.done; END_IF;
3: // M5_Z axis move upward HP IF #SSM1.S.stepfc THEN "DI OUT P02".M5_Z.DRV.MC_MoveAbsolute.Position := "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_0; "DI OUT P02".M5_Z.DRV.Support.SetVelo := "DI OUT P02".MANUAL.M5_Z.Set_TchInVelo_0; RETURN; ELSIF #Index < 4 THEN #SSM1.S.stepnew := 1; END_IF; "M02 M5_Z GoToPosAbso" := NOT "DI OUT P02".M5_Z.HALT_01; #SSM1.S.stepd := "DI OUT P02".M5_Z."MC MoveAbsolute".Done;
4: // Query spring elasticity fault IF NOT #SSM1.S.DlyStart.Q THEN #FLT."3_FAULT_00_15".%X0 := "DI MAIN P05".SEQ1.Shift_Register_BadParts.%X8; "DatOfMod".P02.STS.MeanVal_F1 := ("DI OUT P02".MANUAL.SpringFRC_F1.Measurement[1] + "DI OUT P02".MANUAL.SpringFRC_F1.Measurement[2] + "DI OUT P02".MANUAL.SpringFRC_F1.Measurement[3] + "DI OUT P02".MANUAL.SpringFRC_F1.Measurement[4]) / 4.0; "DatOfMod".P02.STS.MeanVal_F2 := ("DI OUT P02".MANUAL.SpringFRC_F2.Measurement[1] + "DI OUT P02".MANUAL.SpringFRC_F2.Measurement[2] + "DI OUT P02".MANUAL.SpringFRC_F2.Measurement[3] + "DI OUT P02".MANUAL.SpringFRC_F2.Measurement[4]) / 4.0; "DatOfMod".P02.STS.MeanVal_F3 := ("DI OUT P02".MANUAL.SpringFRC_F3.Measurement[1] + "DI OUT P02".MANUAL.SpringFRC_F3.Measurement[2] + "DI OUT P02".MANUAL.SpringFRC_F3.Measurement[3] + "DI OUT P02".MANUAL.SpringFRC_F3.Measurement[4]) / 4.0; "DatOfMod".P02.STS.MeanVal_F4 := ("DI OUT P02".MANUAL.SpringFRC_F4.Measurement[1] + "DI OUT P02".MANUAL.SpringFRC_F4.Measurement[2] + "DI OUT P02".MANUAL.SpringFRC_F4.Measurement[3] + "DI OUT P02".MANUAL.SpringFRC_F4.Measurement[4]) / 4.0; "M02 SEQ1 Done" := "M02 Enbl toRTT" := TRUE; END_IF; END_CASE; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|