


|
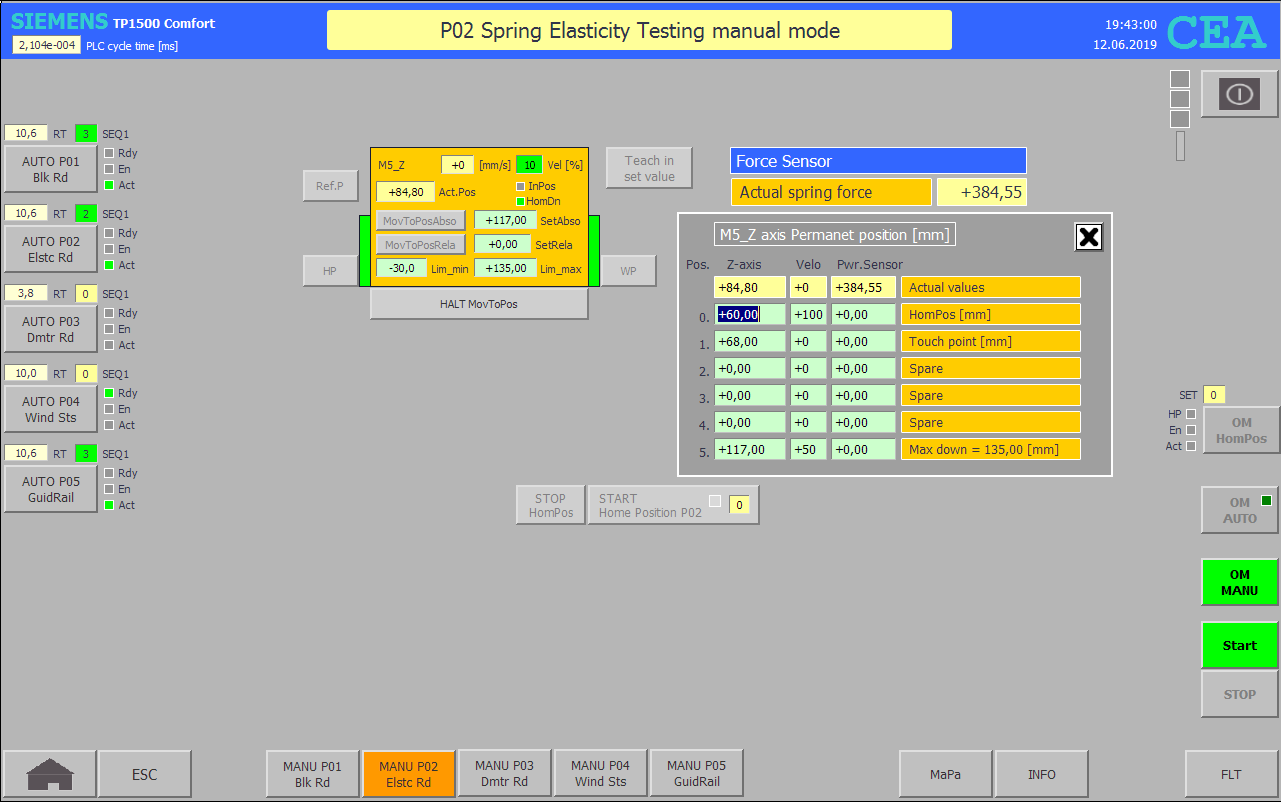
FB48 MAN P02 : Spring elasticity reading - manual mode (slave 2) |
|
|
|
|
|
Netzwerk 1: M5_Z axis Elasticity servo drive enable
IF #ST_MANU AND NOT #SUPPORT_SEQ THEN // 31N1_X In-Press axis IF #M5_Z.ManuVelocity_2 > 100 THEN #M5_Z.ManuVelocity_2 := 100; END_IF; "DI OUT P02".M5_Z.DRV.Support.SetVelo := LINT_TO_LREAL(IN := #M5_Z.ManuVelocity_2); // Jog slow HP (button function) #M5_Z.CmdExe_slow_HP := "HMI KEY".P02.M5_Z.F4_Jog_slow_HP; // Jog slow WP (button function) #M5_Z.CmdExe_slow_WP := "HMI KEY".P02.M5_Z.F3_Jog_slow_WP; END_IF; // 31N1_X Enabling HP "HMI KEY".P02.M5_Z.F11_Enable_HP := "DI OUT P02".M5_Z.DRV.Support.SetVelo > 0.0 AND "DI OUT P02".M5_Z.DRV.Support.InOperation AND "DI OUT P02".M5_Z.DRV.Support.ActPos >= "DI OUT P02".M5_Z.DRV.Support.SW_EndLim_MinPos AND NOT "DI OUT P02".M5_Z.DRV.Support.SW_EndLim_Min AND NOT "DI OUT P02".M5_Z.drv_com_flt; // 31N1_X Enabling WP "HMI KEY".P02.M5_Z.F12_Enable_WP := "DI OUT P02".M5_Z.DRV.Support.SetVelo > 0.0 AND "DI OUT P02".M5_Z.DRV.Support.InOperation AND "DI OUT P02".M5_Z.DRV.Support.ActPos <= "DI OUT P02".M5_Z.DRV.Support.SW_EndLim_MaxPos AND NOT "DI OUT P02".M5_Z.DRV.Support.SW_EndLim_Max AND NOT "DI OUT P02".M5_Z.drv_com_flt; |
|
|
|
|
|
Netzwerk 1: Monitoring manual operation ***
IF NOT #ST_MANU THEN RETURN; ELSIF #MODULE_HP AND NOT #GLB.HomPos_REg THEN "M02 Init" := TRUE; END_IF; #GLB.HomPos_REg := #MODULE_HP; IF #SUPPORT_SEQ THEN RETURN; END_IF; |
|
|
|
|
|
Netzwerk 1: M5_Z axis Elasticity servo drive execute
#M5_Z.CmdExe_slow_fast_WP := "HMI KEY".P02.M5_Z.F12_Enable_WP AND #M5_Z.CmdExe_slow_WP AND NOT "HMI KEY".P02.M5_Z.F21_HALT_GoToPos;
#M5_Z.CmdExe_slow_fast_HP := "HMI KEY".P02.M5_Z.F11_Enable_HP AND #M5_Z.CmdExe_slow_HP AND NOT "HMI KEY".P02.M5_Z.F21_HALT_GoToPos; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|